

Per il nostro progetto abbiamo scelto di utilizzare il microprocessore Arduino UNO, nello specifico la versione Rev4.
Grazie alla sua versatilità e alla vasta gamma di sensori e moduli compatibili, questo microprocessore si è rivelato la scelta ideale per gestire le complesse operazioni di raccolta dati durante il volo e la discesa del satellite.
Architettura e componenti
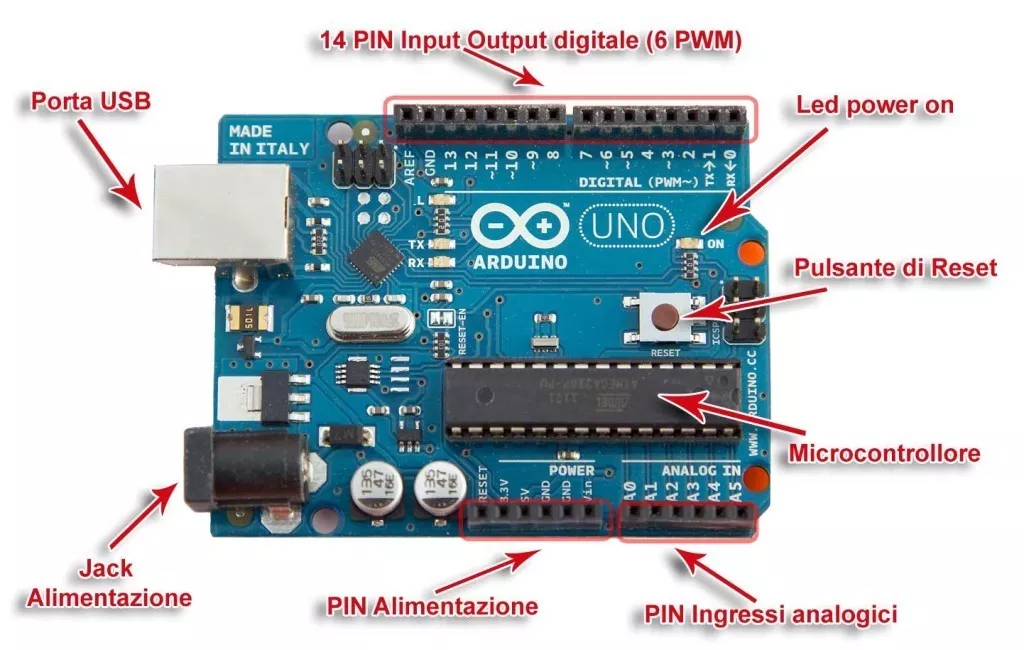
Arduino è dotato di una serie di componenti chiave:
- Porte di input/output (I/O): Queste porte consentono di comunicare con il mondo esterno, sia in ingresso che in uscita. Possono essere configurate come digitali o analogiche a seconda delle esigenze del progetto.
- Interfaccia USB: Utilizzata per la programmazione dell’Arduino e per la comunicazione con il computer host.
- Regolatore di tensione: Arduino può essere alimentato tramite una vasta gamma di fonti di alimentazione, ma il regolatore di tensione integrato si occupa di fornire tensioni stabili al microcontrollore e agli altri componenti.
- Oscillatore: Fornisce il segnale di clock necessario per sincronizzare le operazioni del microcontrollore.
Ambiente di sviluppo

Struttura del codice
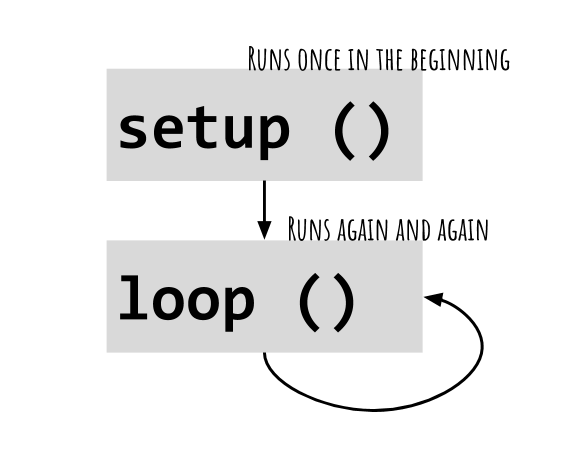
Un tipico programma Arduino è composto da due funzioni principali:
- setup(): Questa funzione viene eseguita una sola volta all’avvio dell’Arduino e viene utilizzata per inizializzare variabili, configurare pin di input/output e in generale preparare l’ambiente di esecuzione del programma.
- loop(): Dopo che la funzione setup() è stata eseguita, Arduino entra in un loop infinito in cui continua a eseguire il codice all’interno della funzione loop(). Questa è l’area del codice dove vengono gestite le operazioni continue del dispositivo, come leggere sensori, controllare attuatori o rispondere a eventi esterni.
Espandibilità e modularità
Lascia un commento